U-SCUAR project update
The U-SCUAR consortium was established to conduct advanced research in the field of unmanned aircraft systems aiming to comply with the requirements of European regulations on UAS. The project proposes the definition and development of a complete system that can operate in medium-risk SAIL III and IV operational scenarios following the SORA methodology and in effective compliance with the requirements of the European regulations on UAS in order to provide the platform of technologies focused on operations under the highest standards of efficiency and safety.
The U-SCUAR project was recognized for its strong strategic, technological, and innovative nature, which is why it has become part of the Aeronautical Technology Programme (PTA) of the Spanish Ministry of Science and Innovation. In turn, this programme is framed within the Strategic Project for Aerospace Economic Recovery and Transformation (PERTE). U-SCUAR stands out for its contribution to unmanned aerial vehicle technologies, meeting the necessary requirements to enter the programme. Project U-SCUAR was subsidized by the CDTI, co-financed with European funds from the Recovery and Resilience Mechanism and supported by the Ministry of Science, Innovation and Universities.
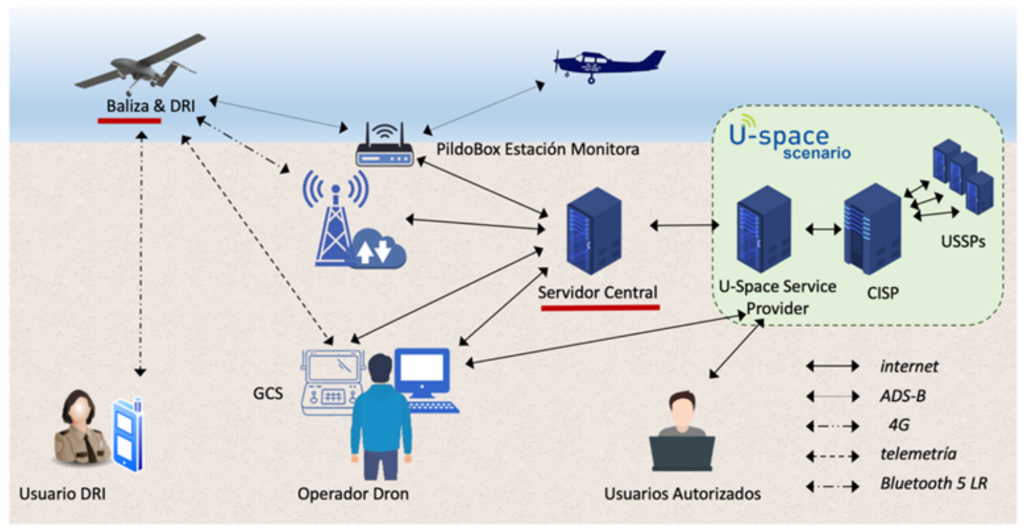
PildoLabs’ role in the project could be summarized as facilitating the drone operators’ access to U-Space and/or providing the drone operator with additional layers of services when the drone operates in volumes where complete U-Space services are not available. The two main subsystems to be developed can be summarised as a U-space tracker device and a central server.
- In the short term, UAS tracker devices emerge as valuable tools for simplifying access to U-space for drones lacking direct interfaces with USSPs. These devices may offer an efficient solution for drone operators owing drones without USSP connectivity, allowing seamless integration into U-space without the complexities of programming such interfaces.
- Looking ahead to the medium term, it’s probable that drone manufacturers will take on the responsibility of managing the interface between drones and USSPs, eliminating the need for operators to incorporate tracker devices for U-space access. However, UAS tracker devices may still have a role to play if they could support advanced features tailored for certain complex missions. Just as examples to illustrate the functionalities such devices could offer in the future, they might include: a) devices equipped with advanced receivers integrated into the drone’s navigation system, ensuring redundant positioning and even allowing the execution of certain procedures, or b) devices equipped with communication systems (i.e IoT, LTE,..) serving as drone backup communication channels in case of C2 channel loss.
- The Central Server, in addition to its functionality of integrating and managing information from the tracker device and the Ground Control Station, will offer services to provide the drone with an additional layer of safety for operating in volumes where U-Space services are not available. PildoLabs expects these functionalities would be interesting for operators wishing to perform complex missions.
By 2024, most of the planned developments for the project have been completed, with final integrations and testing scheduled for 2025. Key developments include: a) Independent tracker prototype integrable into a drone, enabling it for safe navigation in U-space; b) Backbone system providing intelligence and data centralization to the U-SPACE system, including tracking and conformance monitoring services; c) Tools for designing procedures specific to drone navigation; d) Tools for GNSS signal degradation detection; e) Tools for GNSS interference monitoring.
These advancements aim to solidify the U-SCUAR consortium’s contribution to enhancing U-Space integration and the operational capabilities of unmanned aircraft systems.

{kind=link}